Luca Consolini, professeur associé au département d’Ingénierie de l’Information de l’Università di Parma, Italie, donnera un séminaire au MIS le 21 octobre 2021 à 10h00. Le séminaire sera également retransmis en visio.
Abstract:
This talk considers a class of specially structured problems of the form:
max f (x)
subject to a ≤ x ≤ g(x), where f and g are monotone nondecreasing functions.
This simple class contains various problems of interest in control, such that:
• speed planning for road vehicles
• speed planning for robotic manipulators,
• dynamic programming,
• power allocation in wireless networks.
The talk presents the basic properties of the above class of problems and describes an efficient solution algorithm. It also considers specialized algorithms for the speed planning problem, that achieve optimal time-complexity.
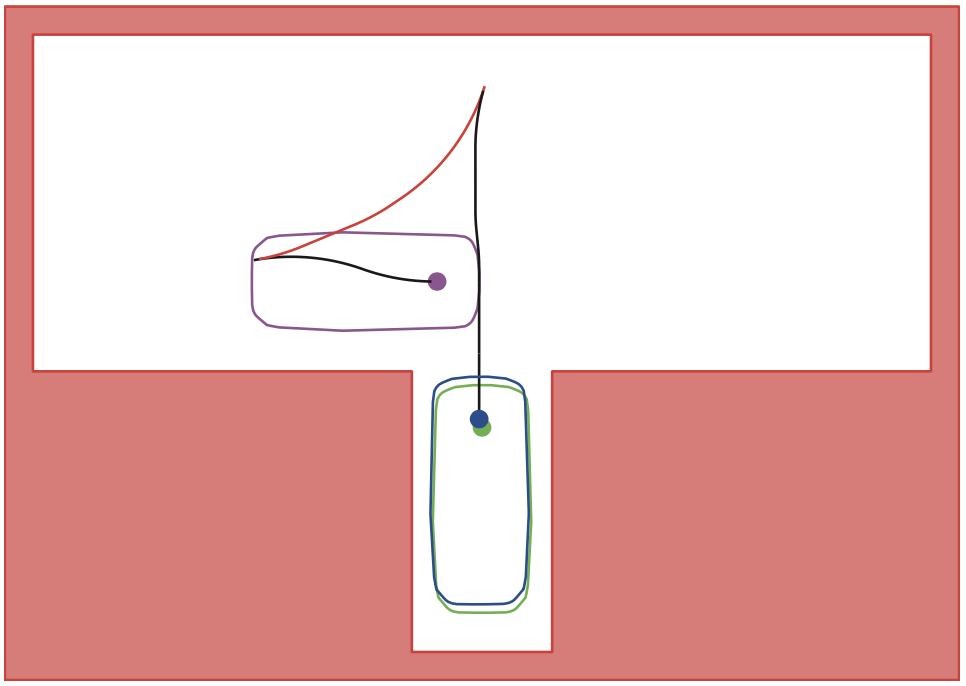
The maneuvering problem for a car-like vehicle in presence of obstacles will be discussed as an application example.